
Afterthoughts of the boat project
I never ended up completing the boat project, atleast not in the planned form. However, it did teach me a lot of new techniques and some of the software also lives on.
Propellers
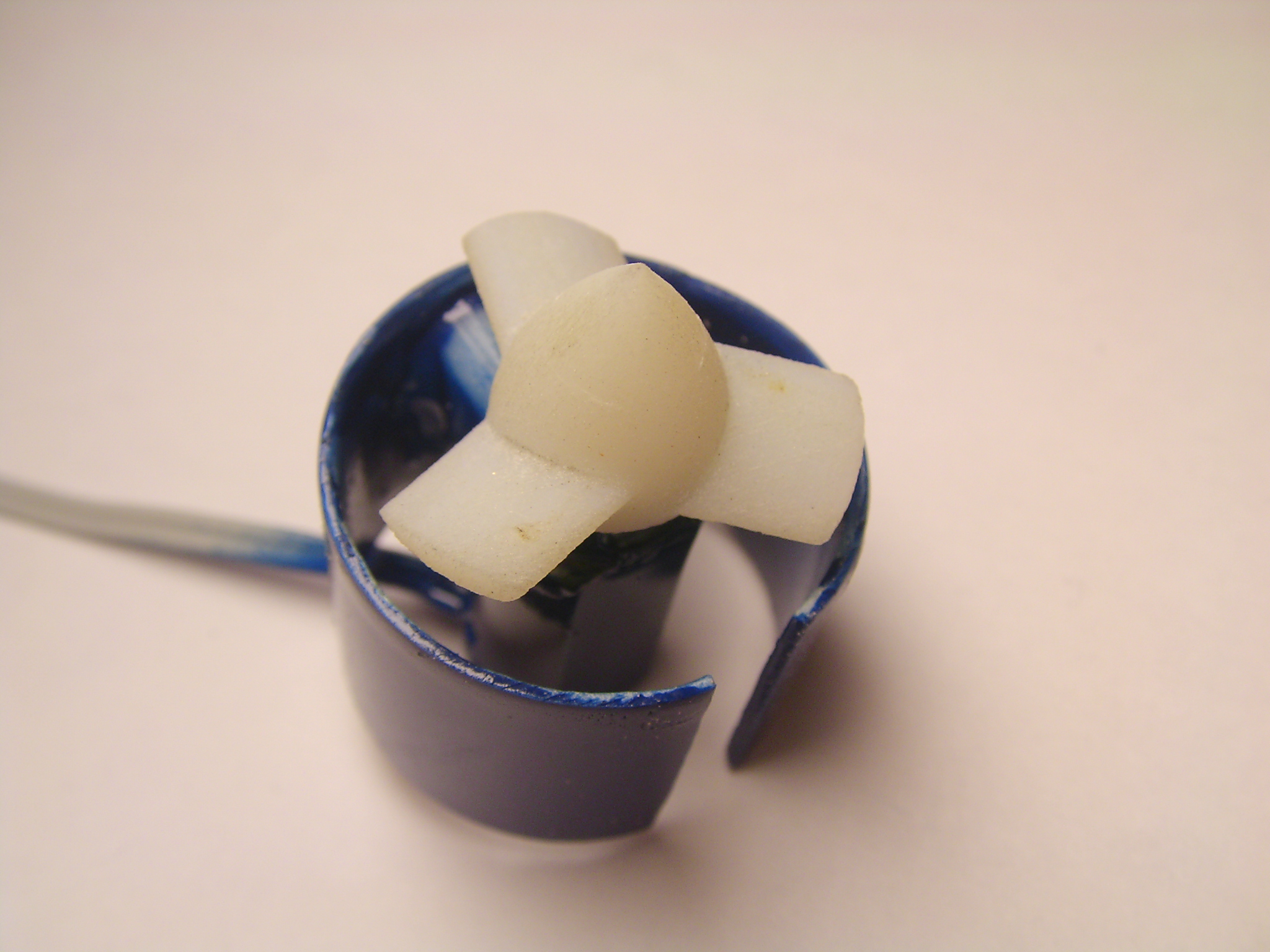 The propeller was designed to fit inside a 2 cm thick PVC pipe.
The propeller was designed to fit inside a 2 cm thick PVC pipe.
 Brass bushing for the motor axis.
Brass bushing for the motor axis.
Designing the motor and propeller assembly ended up being quite difficult. I wanted the whole boat to be solar powered, which heavily limited the power available for the motors. Furthermore, lacking the necessary knowledge, I ended up driving the motors at way too low RPM which hurt the efficiency.
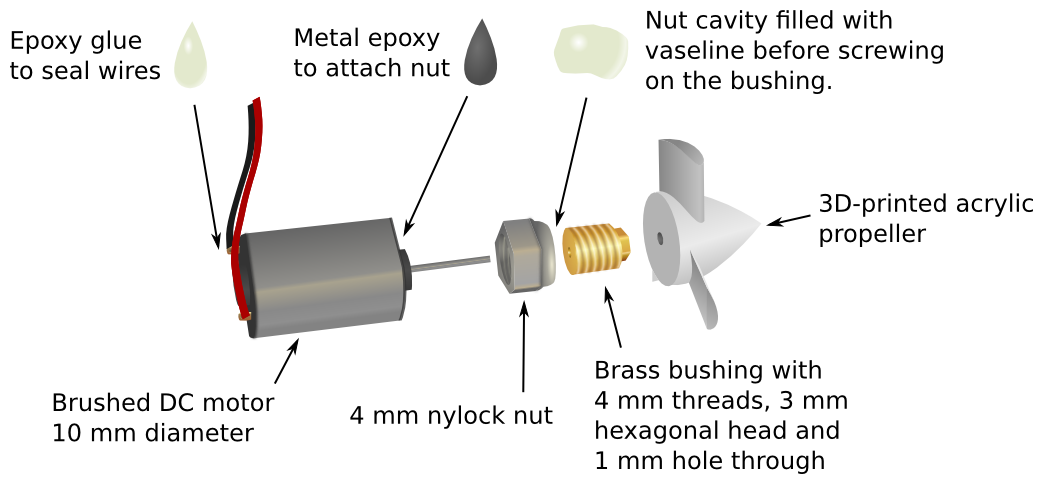
However, the basic technique would probably have worked. I was to have the propellers made of 3D printed plastic (from Shapeways), and the motors installed in small capsules outside the hull. This way any water leaks from the rotating axis would not disturb the electronics, only the individual motor. By having redundancy and protective pipes around the motors, I was planning to have quite good reliability.
Main PCB
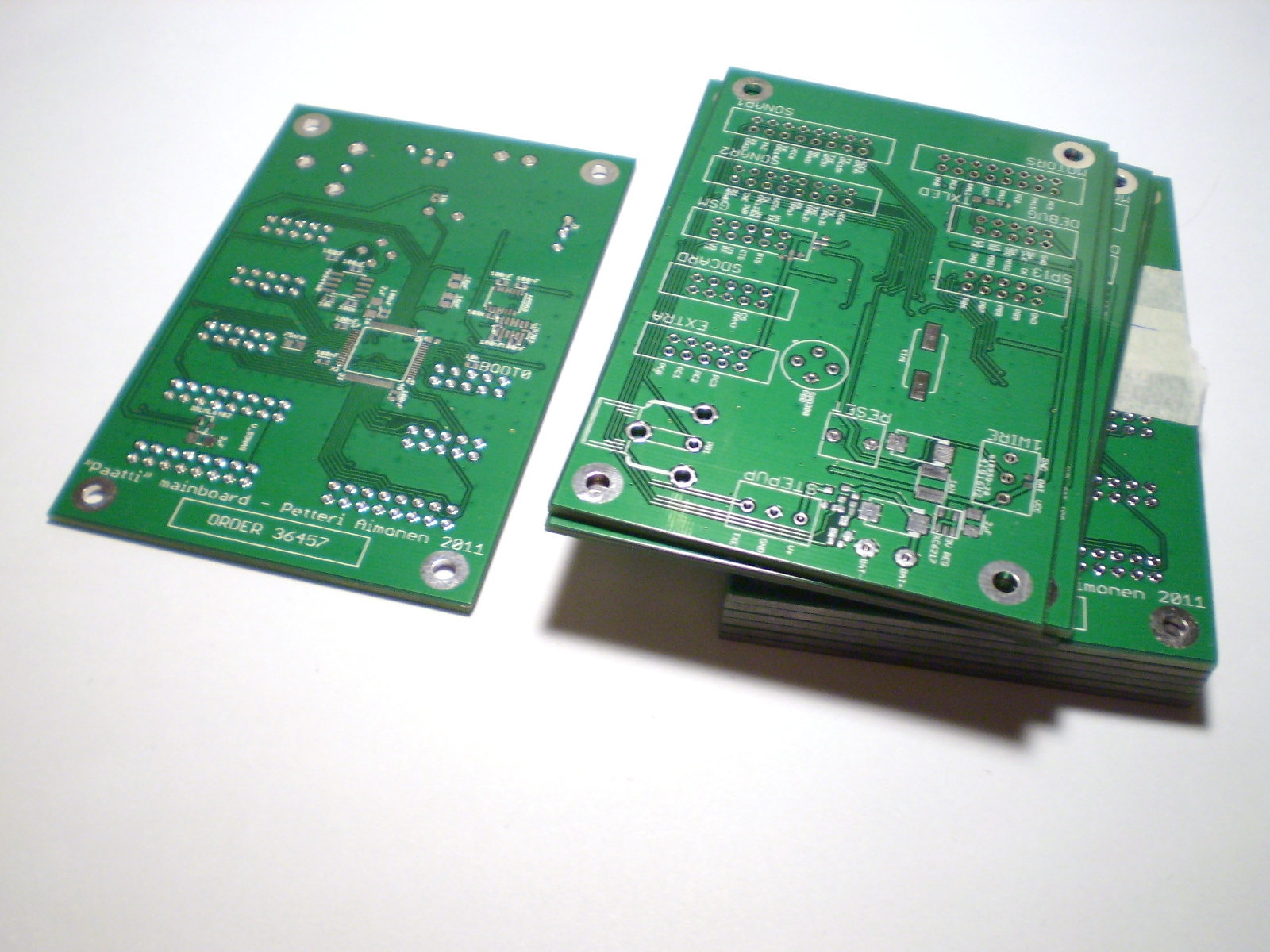
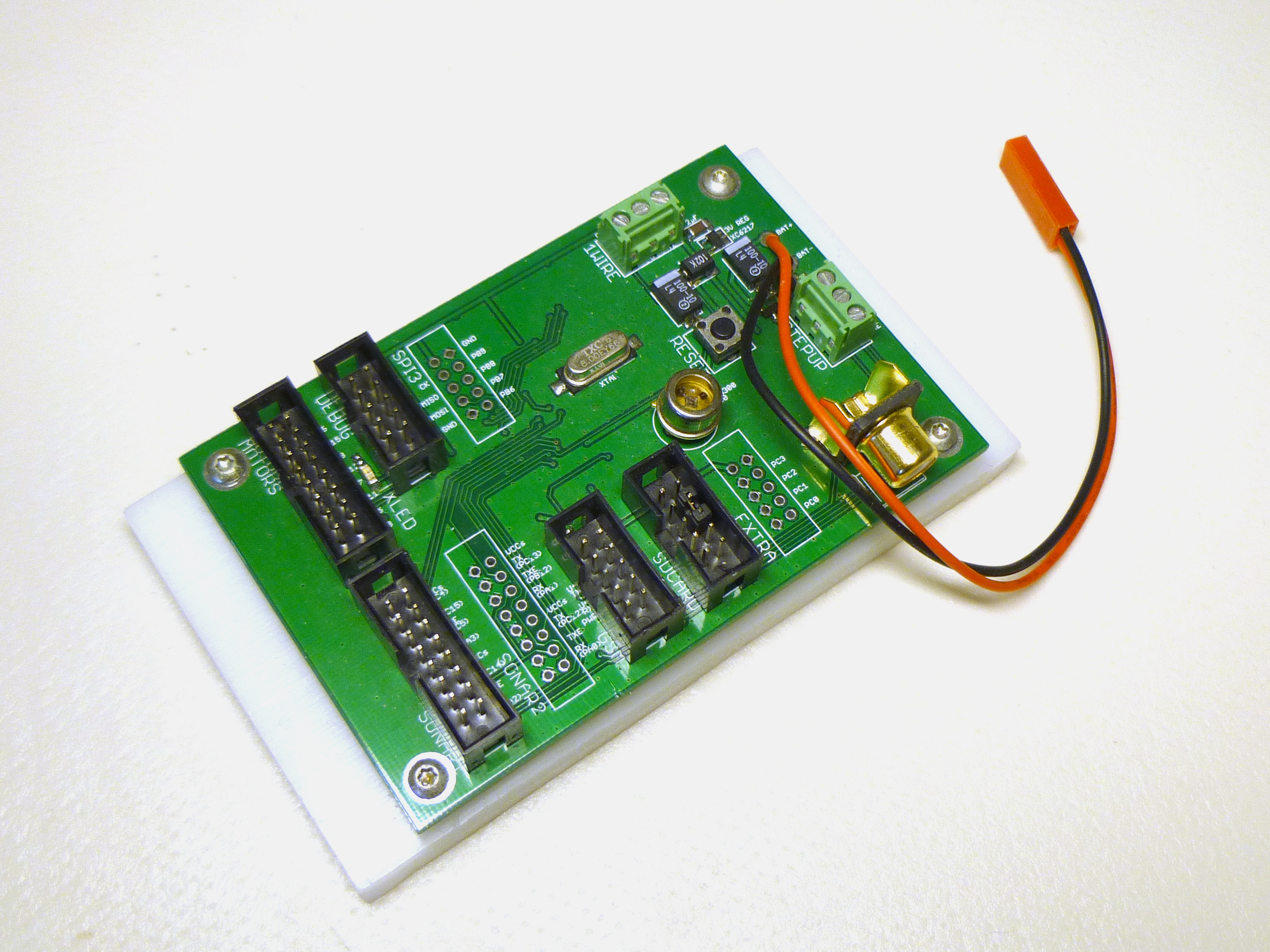
The PCBs were the first I ever had commercially made, and surprisingly they turned out pretty good. Some of the component choices were quite poor, like HM55B for magnetometer, but the experience helped me choose better in later projects, such as the sphere robot.
Software
One of the more important results of this project turned out to be the nanopb library that I wrote for communicating with the boat. Even though I have little use for it myself at the moment, it has gained significant user base and has been a joy to maintain.
Ultrasonics
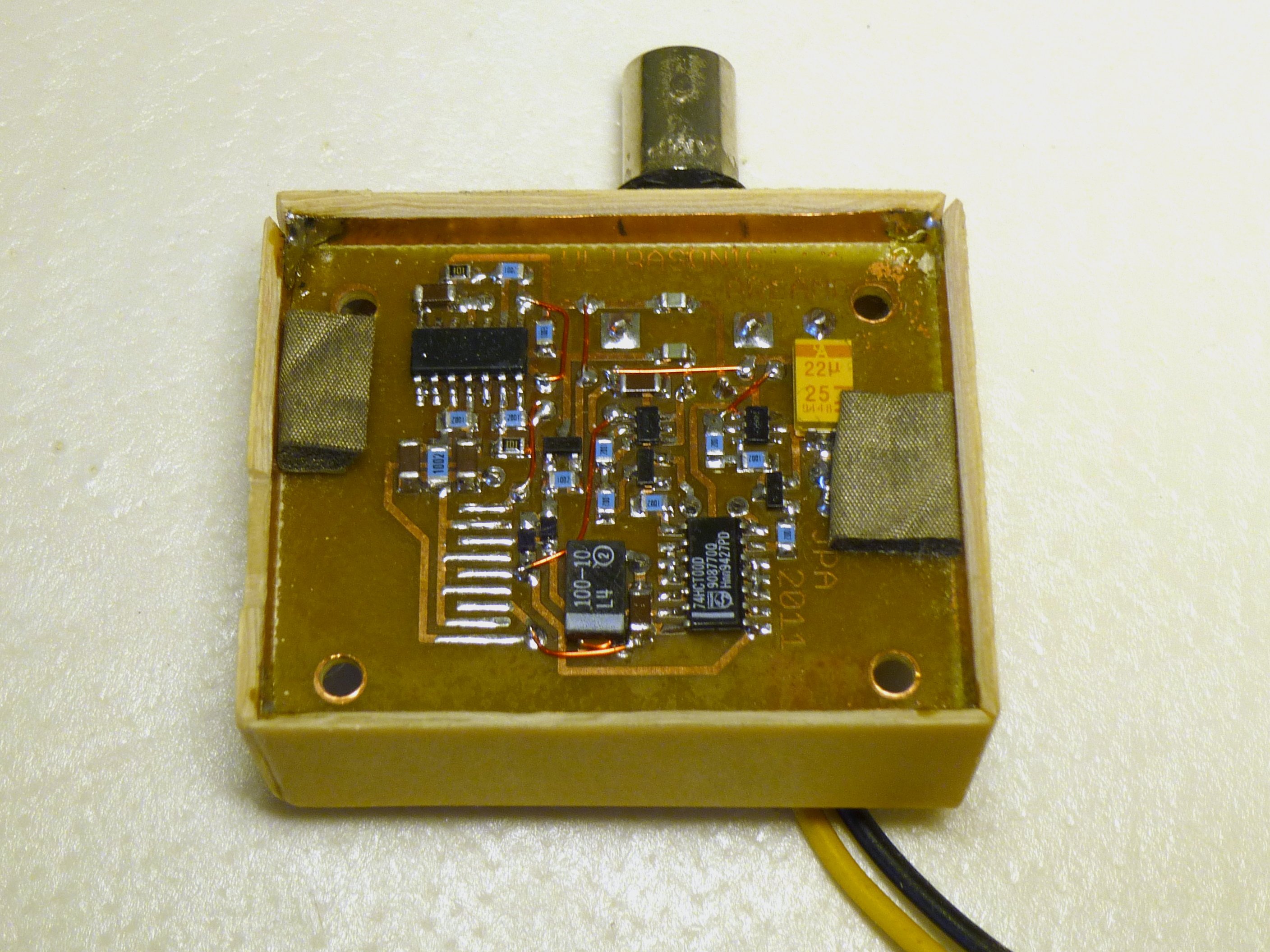 Preamplifier for the ultrasonic sensor
Preamplifier for the ultrasonic sensor
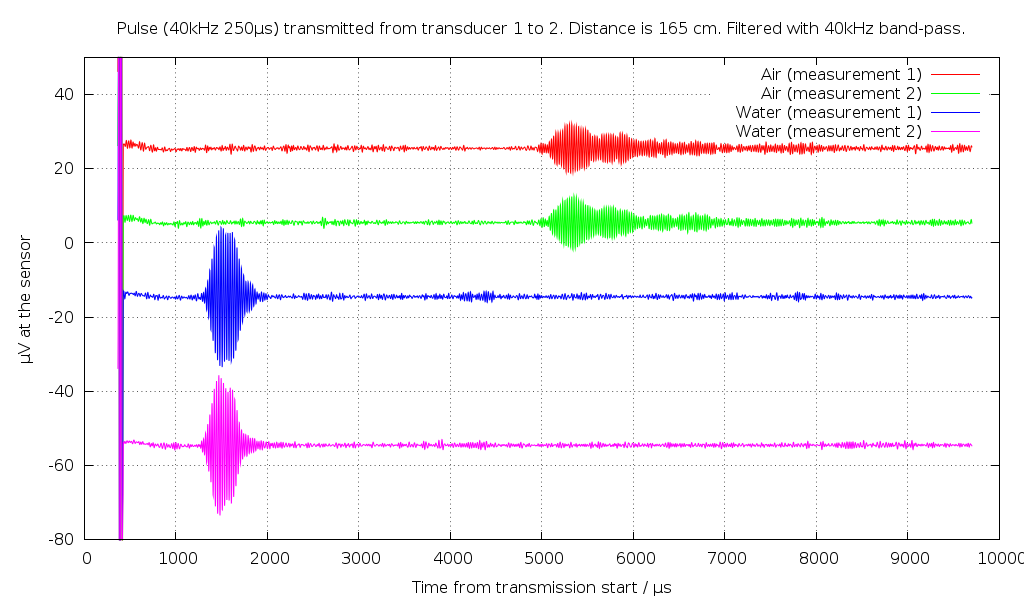
I also ventured into ultrasonic sensors for the purpose of scanning the lake floor with the boat. At the time, UTEC4018 was about the only water-proof ultrasonic transducer that I could afford. It did seem promising in my tests, even though the bandwidth is pretty small. I also had some very interesting discussions with Oliver McFadden about underwater ultrasonic communications.
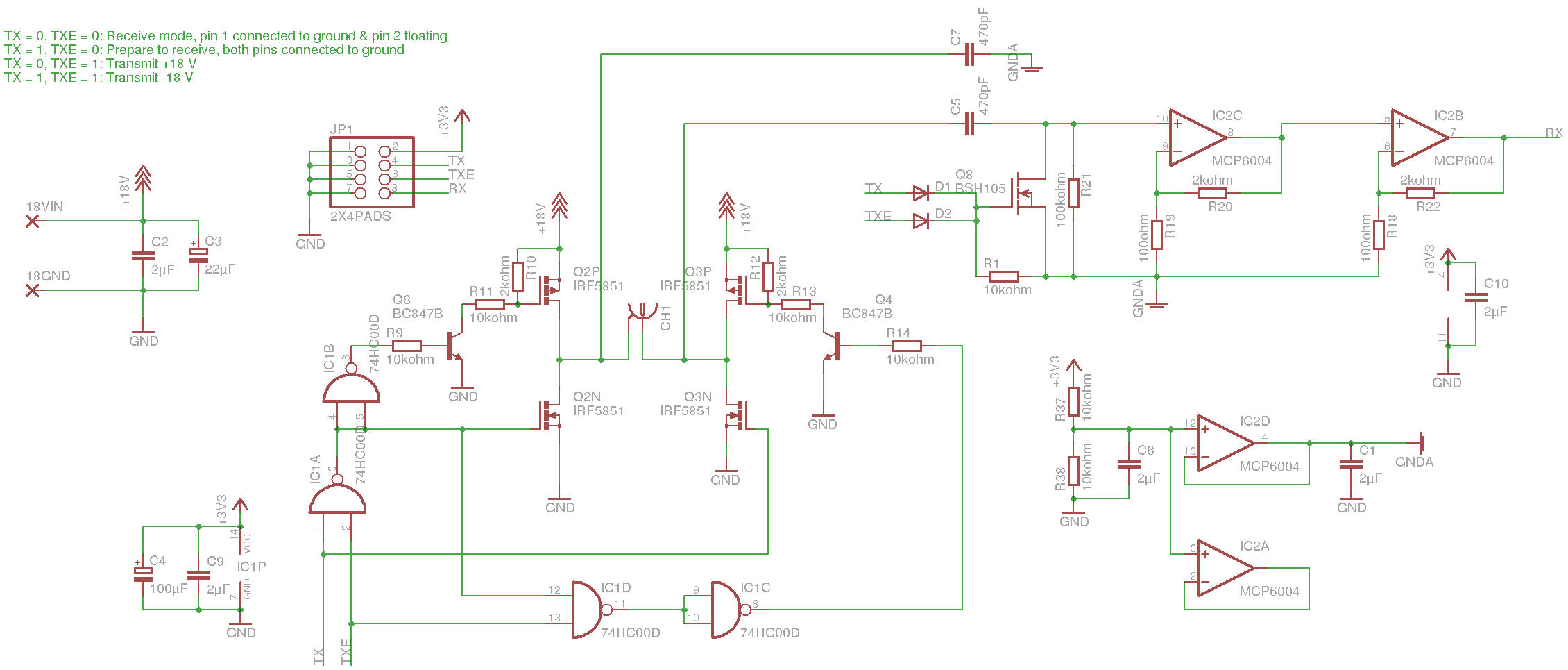
My goal was to use the same transmitters to both send the pulses and to receive the echoes. A problem with this approach is that the residual charge after the pulses sent is enough to saturate the sensitive reception. Having a FET sink the current after the transmission pulse helped a little, but the FET's own capacitance caused its own problems.
Similar projects
There is a much more ambitious project for an autonomous boat, called the Scout. While my boat was only meant to ever travel on lakes, their goal is to cross the atlantic. After a failed attempt earlier in the summer, they seem to finally have successfully launched in August 2013.
– Petteri Aimonen on 2.10.2013